#include "../../Defines.h"
Go to the source code of this file.
Macros | |
| #define | UNO 1 |
| #define | MINI 2 |
| #define | TUMBLER 3 |
| #define | LED 2 |
Functions | |
| void | loop_StepperModule () |
| the main loop for the StepperModule (this is the FeederStateMachine) More... | |
| void | setup_StepperModule () |
| called on setup() More... | |
| void | stepperModule_ProcessClientCmdFinal (char cmd) |
| the Blink the LED - and it will use the latest BUZZER status (so MQTT could set buzzer on.. then call this) More... | |
| int | getFeederType () |
| retreives the feeder type, UNO or MINI More... | |
| boolean | getBuzzStatus_StepperModule () |
| retrieves the buzzer status More... | |
| char * | stepperIdentity_StepperModule () |
Macro Definition Documentation
◆ LED
| #define LED 2 |
Definition at line 51 of file StepperModule.h.
◆ MINI
| #define MINI 2 |
Definition at line 48 of file StepperModule.h.
◆ TUMBLER
| #define TUMBLER 3 |
Definition at line 49 of file StepperModule.h.
◆ UNO
| #define UNO 1 |
Definition at line 47 of file StepperModule.h.
Function Documentation
◆ getBuzzStatus_StepperModule()
| boolean getBuzzStatus_StepperModule | ( | ) |
retrieves the buzzer status
retrieves the buzzer status
Definition at line 107 of file StepperModule.cpp.

◆ getFeederType()
| int getFeederType | ( | ) |
retreives the feeder type, UNO or MINI
retreives the feeder type, UNO or MINI
Definition at line 114 of file StepperModule.cpp.

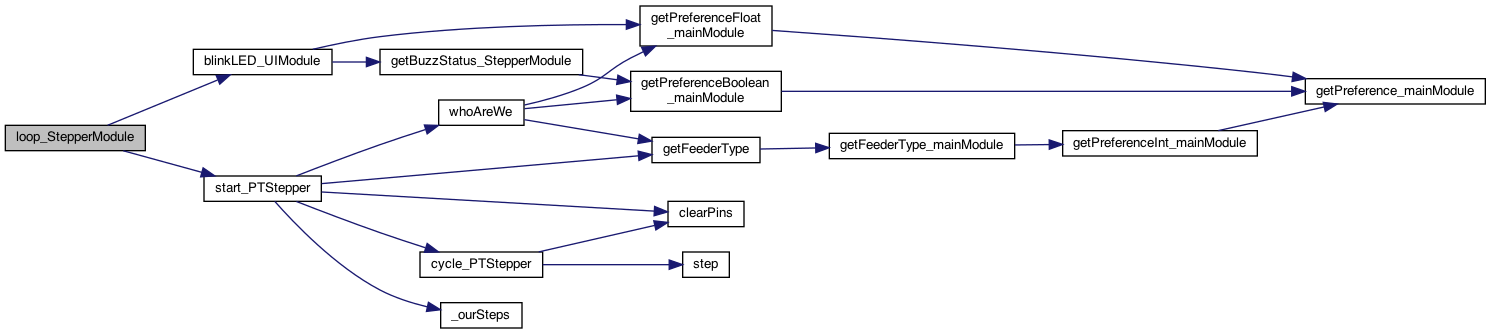
◆ loop_StepperModule()
| void loop_StepperModule | ( | ) |
the main loop for the StepperModule (this is the FeederStateMachine)
the main loop for the StepperModule (this is the FeederStateMachine)
3.24.25 warm rain all day.. no ski call the loop (which might have a timer to stop a motor)
9.2.25 back from LA, Nice here. Sunday off to Europe try 2 feeds right now... 9.3.25 Dead movie.. get the preference
uses current motor class instance
9.4.25 seems the DCMotor is still running when it get's here.. and the next loop doesn't do anything... so maybe a delay (if a DCMotor) – if this works, it would be a class-wide function (get delay amount?)
cancel the feed..
5.3.24 Issue #332 if TUMBLER .. reverse direction
8.2.24 have the auto a mode as well.. for older Tumblers. Default is ON (so we can change the old ones), message: {"set":"autoMotorDirection","val":"true"}
note: reboot not needed as the next time a feed happens, it reads this value
Definition at line 246 of file StepperModule.cpp.

◆ setup_StepperModule()
| void setup_StepperModule | ( | ) |
called on setup()
3.28.24 feed on startup..
3.16.25 use the class ..
NOTE: this is only re-evaluated on reboot .. for now 3.16.25 for now this is compile option .. but no reason the same build cannot support it.. sensor kind (see the M5AtomSensor .. as example)
find it dynamically 3.31.25
if nothing found .. use default
the motorStepper can be nil
5.2.25 default to HDriver..
7.31.25 use default.. 10.26.25 No Power day .. wind storm if NULL then do't have a default..
TODO: task on the pins .. to the definition and make it work backward compatible..
Definition at line 120 of file StepperModule.cpp.


◆ stepperIdentity_StepperModule()
| char * stepperIdentity_StepperModule | ( | ) |
4.1.25 April Fools day. Mt Peak hike (162 bmp strange spike) get the identity of the SenasorPlug nil if non
Definition at line 188 of file StepperModule.cpp.

◆ stepperModule_ProcessClientCmdFinal()
| void stepperModule_ProcessClientCmdFinal | ( | char | cmd | ) |
the Blink the LED - and it will use the latest BUZZER status (so MQTT could set buzzer on.. then call this)
SerialDebug.println("Valid Commands: "); SerialDebug.println(" H == help, this message"); SerialDebug.println(" 0x0, s, c == Single Feed "); SerialDebug.println(" a == AutoFeed "); SerialDebug.println(" u == UNO "); SerialDebug.println(" m == MINI "); SerialDebug.println(" L == Tumbler "); SerialDebug.println(" B == Buzzer On"); SerialDebug.println(" b == Buzzer Off"); SerialDebug.println(" G == Gateway On"); SerialDebug.println(" g == gateway Off"); SerialDebug.println(" R == clean credentials"); SerialDebug.println(" O == OTA update"); SerialDebug.println(" X == clean EPROM"); SerialDebug.println(" T == tilt on"); SerialDebug.println(" t == tilt off"); processes a single character command from BLE (or from MQTT converted to a single character)
NOTE: There are other commands, but these are only the ones that require a action. TODO: make these "events" on the setting of those values. eg. register for stepperValue true or false, etc.. They would be invoked from the 'savePreferencesBoolean' call.
Definition at line 199 of file StepperModule.cpp.

