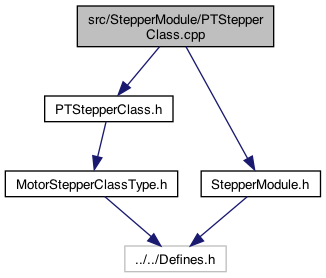
Go to the source code of this file.
Macros | |
| #define | NEW_M5_STEPPER |
| #define | IN1 22 |
| #define | IN2 19 |
| #define | IN3 23 |
| #define | IN4 33 |
| #define | USE_STEPPER_ANGLE_FORMULA |
Functions | |
| int | _ourSteps_PTStepperClass (0) |
| PTStepperClass More... | |
| void | step_PTStepperClass (int steps[][4], int stepCount) |
| void | clearPins_PTStepperClass () |
| void | whoAreWe_PTStepperClass () |
| calculate the steps etc More... | |
| void | cycle_PTStepperClass () |
| cycle More... | |
| int | delayAmount_MotorStepper () |
Variables | |
| int | _targetSteps_PTStepperClass |
| int | _lastType_PTStepperClass = 0 |
| int | _fudgeFactor_PTStepperClass = 0 |
| int | _pins_PTStepperClass [] |
| int | _fullStepCount_PTStepperClass = 4 |
| int | _fullSteps_PTStepperClass [][4] |
| int | _currentStep_PTStepperClass = 0 |
| int | _cycleCounter_PTStepperClass = 0 |
| bool | _clockwise_PTStepperClass = true |
Macro Definition Documentation
◆ IN1
| #define IN1 22 |
Definition at line 51 of file PTStepperClass.cpp.
◆ IN2
| #define IN2 19 |
Definition at line 52 of file PTStepperClass.cpp.
◆ IN3
| #define IN3 23 |
Definition at line 53 of file PTStepperClass.cpp.
◆ IN4
| #define IN4 33 |
Definition at line 54 of file PTStepperClass.cpp.
◆ NEW_M5_STEPPER
| #define NEW_M5_STEPPER |
Definition at line 48 of file PTStepperClass.cpp.
◆ USE_STEPPER_ANGLE_FORMULA
| #define USE_STEPPER_ANGLE_FORMULA |
Function Documentation
◆ _ourSteps_PTStepperClass()
| int _ourSteps_PTStepperClass | ( | 0 | ) |
8.30.25 LA Warm, Zuma Beach - end scene of Planet of Apes for now .. use the PTStepper.h

◆ clearPins_PTStepperClass()
| void clearPins_PTStepperClass | ( | ) |
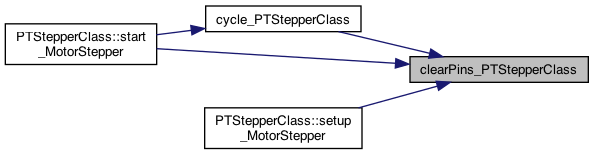
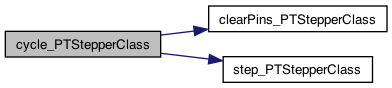
◆ cycle_PTStepperClass()
| void cycle_PTStepperClass | ( | ) |
cycle
Definition at line 208 of file PTStepperClass.cpp.

◆ delayAmount_MotorStepper()
| int delayAmount_MotorStepper | ( | ) |
9.4.25 delay amount after a start_MotorStepper defaults = 0
Definition at line 242 of file PTStepperClass.cpp.
◆ step_PTStepperClass()
| void step_PTStepperClass | ( | int | steps[][4], |
| int | stepCount | ||
| ) |

◆ whoAreWe_PTStepperClass()
| void whoAreWe_PTStepperClass | ( | ) |
calculate the steps etc
converts degrees to motor cycles
6.14.2024 put this back as the if-else was goofed up.
see if the motor direction is clockwise == true
Definition at line 112 of file PTStepperClass.cpp.


Variable Documentation
◆ _clockwise_PTStepperClass
| bool _clockwise_PTStepperClass = true |
Definition at line 94 of file PTStepperClass.cpp.
◆ _currentStep_PTStepperClass
| int _currentStep_PTStepperClass = 0 |
Definition at line 86 of file PTStepperClass.cpp.
◆ _cycleCounter_PTStepperClass
| int _cycleCounter_PTStepperClass = 0 |
Definition at line 88 of file PTStepperClass.cpp.
◆ _fudgeFactor_PTStepperClass
| int _fudgeFactor_PTStepperClass = 0 |
Definition at line 27 of file PTStepperClass.cpp.
◆ _fullStepCount_PTStepperClass
| int _fullStepCount_PTStepperClass = 4 |
Definition at line 76 of file PTStepperClass.cpp.
◆ _fullSteps_PTStepperClass
| int _fullSteps_PTStepperClass[][4] |
Definition at line 77 of file PTStepperClass.cpp.
◆ _lastType_PTStepperClass
| int _lastType_PTStepperClass = 0 |
Definition at line 26 of file PTStepperClass.cpp.
◆ _pins_PTStepperClass
| int _pins_PTStepperClass[] |
Definition at line 56 of file PTStepperClass.cpp.
◆ _targetSteps_PTStepperClass
| int _targetSteps_PTStepperClass |
Definition at line 25 of file PTStepperClass.cpp.