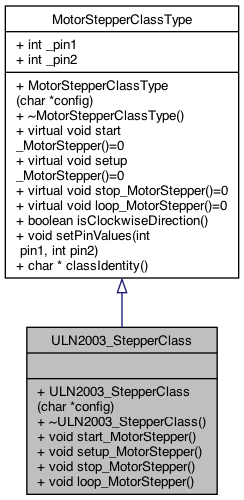
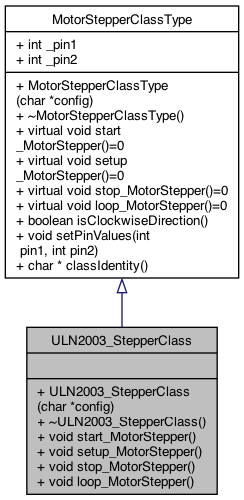
An concrete class. More...
#include <ULN2003_StepperClass.h>
Public Member Functions | |
| ULN2003_StepperClass (char *config) | |
| constructor More... | |
| ~ULN2003_StepperClass () | |
| destructor More... | |
| void | start_MotorStepper () |
| starts the PTStepper More... | |
| void | setup_MotorStepper () |
| setup the PTStepper More... | |
| void | stop_MotorStepper () |
| stops motor More... | |
| void | loop_MotorStepper () |
| loop the PTStepper (so timer can run) More... | |
 Public Member Functions inherited from MotorStepperClassType Public Member Functions inherited from MotorStepperClassType | |
| MotorStepperClassType (char *config) | |
| saves the identity (OOPS.. not working.. it's shared by all class instances.. so last one wins.. More... | |
| ~MotorStepperClassType () | |
| destructor More... | |
| virtual void | start_MotorStepper ()=0 |
| virtual int | delayAmountBetweenMotor () |
| virtual void | setup_MotorStepper ()=0 |
| setup the PTStepper More... | |
| virtual void | stop_MotorStepper ()=0 |
| stop the motor More... | |
| virtual void | loop_MotorStepper ()=0 |
| loop the PTStepper (so timer can run) More... | |
| boolean | isClockwiseDirection () |
| returns if clockwise More... | |
| void | setPinValues (int pin1, int pin2) |
| char * | classIdentity () |
Additional Inherited Members | |
| Public Attributes inherited from MotorStepperClassType | |
| int | _pin1 = 0 |
| int | _pin2 = 0 |
| pin2 More... | |
Detailed Description
An concrete class.
Definition at line 16 of file ULN2003_StepperClass.h.
Constructor & Destructor Documentation
◆ ULN2003_StepperClass()
| ULN2003_StepperClass::ULN2003_StepperClass | ( | char * | config | ) |
constructor
Definition at line 43 of file ULN2003_StepperClass.cpp.
◆ ~ULN2003_StepperClass()
| ULN2003_StepperClass::~ULN2003_StepperClass | ( | ) |
destructor
Member Function Documentation
◆ loop_MotorStepper()
|
virtual |
loop the PTStepper (so timer can run)
Implements MotorStepperClassType.
Definition at line 169 of file ULN2003_StepperClass.cpp.

◆ setup_MotorStepper()
|
virtual |
setup the PTStepper
These are called from StepperModule Prepare motor controller
FIRST: normalize in case use goofed up, especially 0 grab this value.
grab this value.
create stepper motor
Set motor speed (RPM) 15 is default...
5.3.25 trying to figure out the PIN use
Implements MotorStepperClassType.
Definition at line 74 of file ULN2003_StepperClass.cpp.


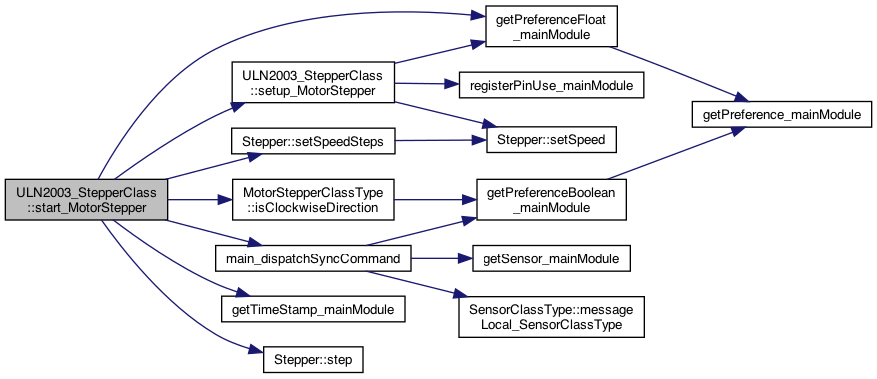
◆ start_MotorStepper()
|
virtual |
starts the PTStepper
Data members of class Generic config info .. specific the the sensor type
This will advance the stepper clockwise once by the angle specified in SetupStepper. Example 16 pockets in UNO is 22.5 degrees This is the FEED message .. the comments mention the Stepper Motor .. which this isn't
5.15.25 try the async CLICK click call 5.26.25 SYNC version
FIRST: normalize in case use goofed up, especially 0 grab this value.
grab this value.
create stepper motor 8.14.25 Setting the Speed and Steps each time.. Set motor speed (RPM) 15 is default...
Implements MotorStepperClassType.
Definition at line 114 of file ULN2003_StepperClass.cpp.
◆ stop_MotorStepper()
|
virtual |
stops motor
stop the motor
7.9.25 if the pin was set use it otherwise use the hard coded values LOW is off
Implements MotorStepperClassType.
Definition at line 55 of file ULN2003_StepperClass.cpp.


The documentation for this class was generated from the following files:
- src/StepperModule/ULN2003_StepperClass.h
- src/StepperModule/ULN2003_StepperClass.cpp