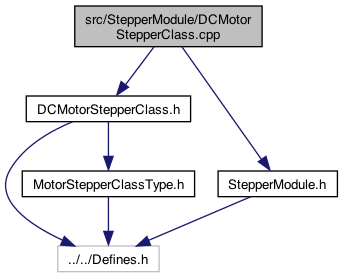
Go to the source code of this file.
Macros | |
| #define | MOTOR_IN1 13 |
| from Orion's small program 3.16.25 More... | |
| #define | MOTOR_IN2 12 |
| #define | BUZZER_IN1 14 |
| #define | BUZZER_IN2 27 |
| #define | NUM_PINS 2 |
| #define | NEW_CODE_HERE |
| #define | BUZZER_CODE |
Functions | |
| void | clearPins_DCMotorStepper () |
Variables | |
| TimerDelayClass * | _timerDelayClass_DCMotorStepperClass |
| DCMotorStepper More... | |
| float | _delaySeconds_DCMotorStepper_setting = 0.5 |
| default .. this could be set via Preferences (TODO) More... | |
| int | _pins_DCMotorStepperClass [NUM_PINS] |
Macro Definition Documentation
◆ BUZZER_CODE
| #define BUZZER_CODE |
◆ BUZZER_IN1
| #define BUZZER_IN1 14 |
Definition at line 34 of file DCMotorStepperClass.cpp.
◆ BUZZER_IN2
| #define BUZZER_IN2 27 |
Definition at line 35 of file DCMotorStepperClass.cpp.
◆ MOTOR_IN1
| #define MOTOR_IN1 13 |
from Orion's small program 3.16.25
Definition at line 32 of file DCMotorStepperClass.cpp.
◆ MOTOR_IN2
| #define MOTOR_IN2 12 |
Definition at line 33 of file DCMotorStepperClass.cpp.
◆ NEW_CODE_HERE
| #define NEW_CODE_HERE |
◆ NUM_PINS
| #define NUM_PINS 2 |
Definition at line 37 of file DCMotorStepperClass.cpp.
Function Documentation
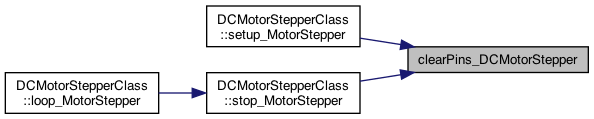
◆ clearPins_DCMotorStepper()
| void clearPins_DCMotorStepper | ( | ) |
This replaces the following, when clearPins() called
pinMode(MOTOR_IN1, OUTPUT); pinMode(MOTOR_IN2, OUTPUT); pinMode(BUZZER_IN1, OUTPUT); pinMode(BUZZER_IN2, OUTPUT); digitalWrite(MOTOR_IN1, LOW); digitalWrite(MOTOR_IN2, LOW); digitalWrite(BUZZER_IN1, LOW); digitalWrite(BUZZER_IN2, LOW); #endif
Definition at line 58 of file DCMotorStepperClass.cpp.
Variable Documentation
◆ _delaySeconds_DCMotorStepper_setting
| float _delaySeconds_DCMotorStepper_setting = 0.5 |
default .. this could be set via Preferences (TODO)
Definition at line 18 of file DCMotorStepperClass.cpp.
◆ _pins_DCMotorStepperClass
| int _pins_DCMotorStepperClass[NUM_PINS] |
Definition at line 39 of file DCMotorStepperClass.cpp.
◆ _timerDelayClass_DCMotorStepperClass
| TimerDelayClass* _timerDelayClass_DCMotorStepperClass |
create instance of the timer class
Definition at line 15 of file DCMotorStepperClass.cpp.